Flow around cylinder
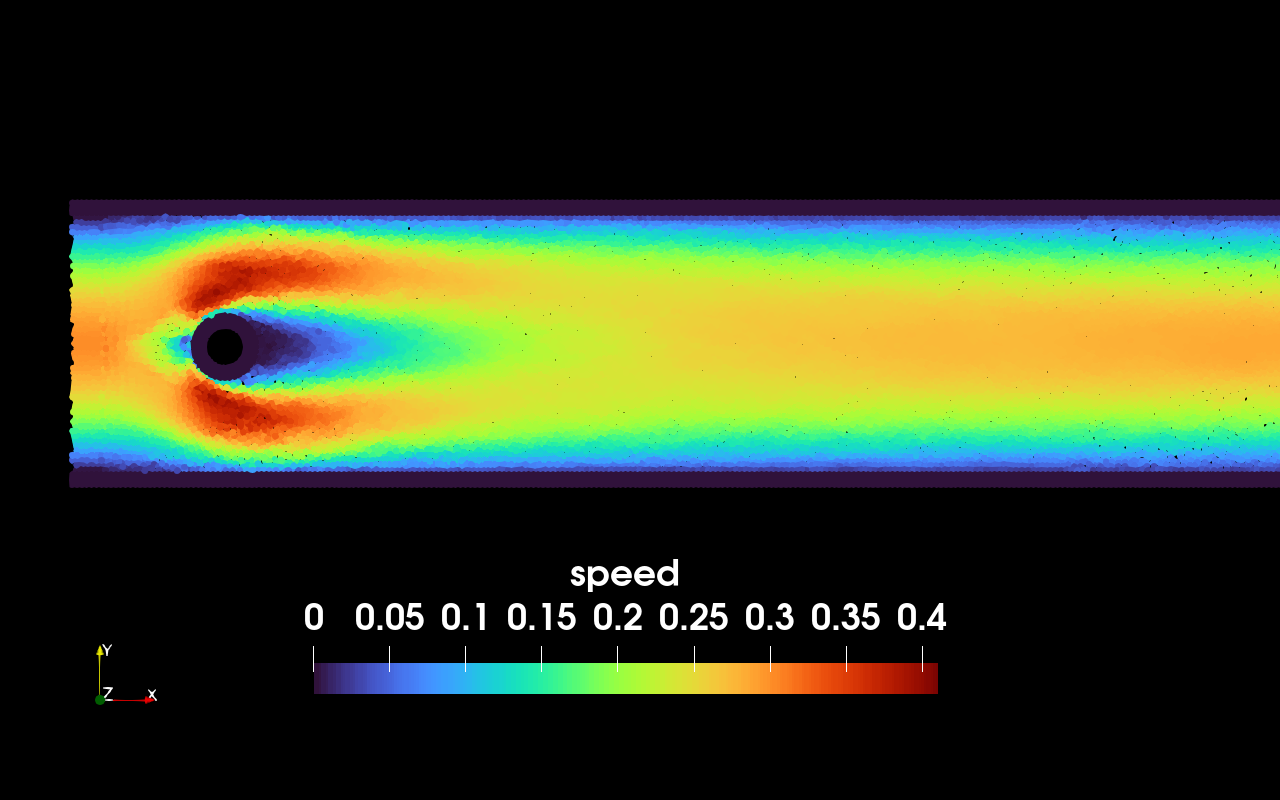
A simulation of flow around cylinder. All parameters of this benchmark can be found here.
The initial setup was created using the packing technique from a paper Particle packing algorithm for SPH schemes by Colagrosi et al.
module cylinder
using Printf
using SmoothedParticles
const folder_name = "results/cylinder"Declare constants
#geometry parameters
const chan_l = 2.2
const chan_w = 0.41 #width of the channel
const cyl1 = 0.2 #x coordinate of the cylinder
const cyl2 = 0.005 #y coordinate of the cylinder
const cyl_r = 0.05 #radius of the cylinder
const dr = pi*cyl_r/20 #average particle distance (decrease to make finer simulation)
const h = 2.4*dr
const bc_width = 6*dr
const x2_min = -chan_w/2 - 6*dr
const x2_max = chan_w/2 + 6*dr
#physical parameters
const U_max = 0.3 #maximum inflow velocity
const rho0 = 1.0 #referential fluid density
const m0 = rho0*dr^2 #particle mass
const c = 20.0*U_max #numerical speed of sound
const mu = 1.0e-3 #dynamic viscosity
const nu = 0.1*h*c #pressure stabilization
#temporal parameters
const dt = 0.1*h/c #time step
const t_end = 10.0 #end of simulation
const dt_frame = max(dt, t_end/200) #how often data is saved
const t_acc = 1.0 #time to accelerate to full speed
const t_measure = t_end/2 #time from which we start measuring drag and lift
#particle types
const FLUID = 0.
const INFLOW = 1.
const WALL = 2.
const OBSTACLE = 3.Declare variables to be stored in a Particle
mutable struct Particle <: AbstractParticle
x::RealVector #position
v::RealVector #velocity
a::RealVector #acceleration
rho::Float64 #density
Drho::Float64 #rate of density
P::Float64 #pressure
m::Float64 #mass
type::Float64 #particle type
Particle(x, type=FLUID) = begin
return new(x, VEC0, VEC0, rho0, 0., 0., m0, type)
end
end
function make_system()
domain = Rectangle(-bc_width, x2_min, chan_l, x2_max)
sys = ParticleSystem(Particle, domain, h)
import_particles!(sys, "init/cylinder.vtp", x -> Particle(x))
return sys
end
#Inflow function
function set_inflow_speed!(p::Particle, t::Float64)
if p.type == INFLOW
s = min(1.0, t/t_acc)
v1 = s*U_max*(1.0 - (2.0*p.x[2]/chan_w)^2)
p.v = v1*VECX
end
end
#Define interactions between particles
@inbounds function balance_of_mass!(p::Particle, q::Particle, r::Float64)
ker = q.m*rDwendland2(h,r)
p.Drho += ker*(dot(p.x-q.x, p.v-q.v))
if p.type == FLUID && q.type == FLUID
p.Drho += 2*nu/p.rho*(p.rho - q.rho)
end
end
function find_pressure!(p::Particle)
if p.x[1] >= -bc_width + h
p.rho += p.Drho*dt
end
p.Drho = 0.0
p.P = c^2*(p.rho - rho0)
end
@inbounds function internal_force!(p::Particle, q::Particle, r::Float64)
ker = q.m*rDwendland2(h,r)
x_pq = p.x - q.x
p.a += -ker*(p.P/p.rho^2 + q.P/q.rho^2)*x_pq
p.a += 8.0*ker*mu/(p.rho*q.rho)*dot(p.v - q.v, x_pq)/(r*r + 0.01*h*h)*x_pq
end
function move!(p::Particle)
p.a = VEC0
if p.type == FLUID || p.type == INFLOW
p.x += dt*p.v
end
end
function gravity(p::Particle)
#f = (RealVector(cyl1, cyl2, 0.0) - p.x)
f = RealVector(cyl1 - p.x[1], -p.x[2], 0.0)
absf2 = (cyl1 - p.x[1])^2 + p.x[2]^2
return 0.3*U_max^2*f/absf2
end
function accelerate!(p::Particle)
if p.type == FLUID
p.v += 0.5*dt*(p.a + gravity(p))
end
end
function add_new_particles!(sys::ParticleSystem)
new_particles = Particle[]
for p in sys.particles
if p.type == INFLOW && p.x[1] >= 0
p.type = FLUID
x = p.x - bc_width*VECX
newp = Particle(x, INFLOW)
push!(new_particles, newp)
end
end
append!(sys.particles, new_particles)
end
function calculate_force(obstacle::Vector{Particle})::RealVector
F = sum(p -> p.m*p.a, obstacle)
L_char = 0.1
U_mean = 2/3*U_max
C = 2.0*F/(L_char*U_mean^2)
return C
end
function main()
sys = make_system()
out = new_pvd_file(folder_name)
save_frame!(out, sys, :v, :P, :rho, :type)
C_SPH = VEC0
C_ref = RealVector(5.57953523384, 0.010618948146, 0.)
nsteps = Int64(round(t_end/dt))
nsamples = 0
obstacle = filter(p -> p.type==OBSTACLE, sys.particles)
#a modified Verlet scheme
for k = 1 : nsteps
t = k*dt
apply!(sys, accelerate!)
apply!(sys, move!)
add_new_particles!(sys)
apply!(sys, p -> set_inflow_speed!(p,t))
create_cell_list!(sys)
apply!(sys, balance_of_mass!)
apply!(sys, find_pressure!)
apply!(sys, internal_force!)
apply!(sys, accelerate!)
if t > t_measure
nsamples += 1
C_SPH += calculate_force(obstacle)
end
#save data at selected frames
if (k % Int64(round(dt_frame/dt)) == 0)
@show t
println("N = ", length(sys.particles))
println("C_drag = ", C_SPH[1]/nsamples)
println("ref value = ", C_ref[1])
println("C_lift = ", C_SPH[2]/nsamples)
println("ref value = ", C_ref[2])
save_frame!(out, sys, :v, :P, :rho, :type)
end
end
save_pvd_file(out)
println()
C_SPH = C_SPH/nsamples
relative_error = norm(C_SPH - C_ref)/norm(C_ref)
@show C_SPH
@show C_ref
println("relative error = ",100*relative_error,"%")
end
endThis page was generated using Literate.jl.